
quelle est l'utilité des micro pas ?
5 participants
Page 2 sur 2
Page 2 sur 2 •  1, 2
1, 2
Re: quelle est l'utilité des micro pas ?
charly 57 Sam 02 Juin 2012, 19:45
Merci Lil pour ces précisions.
Je me rends compte que je ne joue pas dans la même cour que toi.
Avec 400 Volts et 200 Ampères les copeaux n'ont qu'à bien se tenir !!!!!
J'ai mis ton schéma dans mes archives, il me sera certainement utile.
Bon dimanche
Je me rends compte que je ne joue pas dans la même cour que toi.
Avec 400 Volts et 200 Ampères les copeaux n'ont qu'à bien se tenir !!!!!
J'ai mis ton schéma dans mes archives, il me sera certainement utile.
Bon dimanche
charly 57- Chevronné

- Messages : 442
Date d'inscription : 30/09/2010
Re: quelle est l'utilité des micro pas ?
chris74 Sam 02 Juin 2012, 20:01
Pour ma part j'ai fais des essai cet après midi en 1/2;1/4;1/8 et 1/16 de pas et bien la différence n'est quand même pas flagrante................j'ai laissé en 1/2 pas sur le Z et les autres axes seront en 1/16eme (les cartes sont "planquées et du coup je ne peut pas mettre les cavaliers sans démontage............la raison du fainéant quoi  )
)
)
chris74- Chevronné
- Messages : 774
Date d'inscription : 16/10/2010
Re: quelle est l'utilité des micro pas ?
Invité Dim 03 Juin 2012, 12:07
tout à fait, la différence ne saute pas forcément aux yeux, en faite on l'entend surtout en grande vitesse et on le voit dans la précision mais bon si tu usines au 1/10ème et que un pas = 0.01mm alors ne t'embête pas à passer en micro pas.
sur certain proto j'ai pris des moteurs pas à pas d'imprimante en pas complet et non en fraction de pas pour une précision de 0.01mm et franchement j'en suis très content pour le travail demandé.
pendant que j'y pense, le micro pas est aussi un effet de mode et un argument de vente, il est montré comme le top du top mais en faite c'est du pipo, le micro pas est bien que dans certaine condition sinon on y perd en vitesse et même parfois en précision.
le soucis vient du fait que le passage d'un pas à un autre est gradué en micro pas mais si l'un saute et bien tu as un décalage dans le temps qui sera effacer une fois le pas accompli mais entre temps si tu mesure les dimensions de ta pièce et bien dans les parties courbe tu auras bien le décalage du micro pas qui n'est pas bien passé, certe ça sera casi impossible à mesurer vu qu'on descend au micron (enfin suivant le rapport de réduction évidemment) sur une distance d'un micron mais bon si le problême persiste il va y avoir répétition et c'est la qu'on va commencer à le voir.
il vaut mieux un moteur qui fait des pas franc et sans erreur qu'un qui fait des fractions de pas douteuse et non vérifiable.
un autre soucis c'est que le micro pas est le passage "graduel" d'un pas vers un autre hors les composants chauffent et donc leur réaction varie alors qu'en pas complet on a que du ON/OFF et non de transition graduelle.
Lil sera plus amène de donner son avis sur ce phénomène électronique dû à la chaleur que moi
je précise que ça dépasse très largement le cadre amateur, vu qu'on va entrer dans les courbes de vitesse, puissance, etc... donc ça frole le délir mais bon c'est juste pour comprendre
petit rajout pendant que j'y pense
ce qui m'agasse en CNC amateur c'est de voir que ça prend le même chemin que dans l'automobile c'est à dire qu'on met du fric dans le matériel électronique et le décor mais que finalement ça marche moins bien et c'est moins accessible que les anciennes voitures sans électronique, dans les CNC amateur c'est pareil, on voit un tas de machine avec guide à billes, super moteurs et carte électronique de pointe mais des chassis merdique en alu qui de ce fait donne des machines de faibles performances alors qu'avec un chassis tout acier moins cher et du matos bien choisi et bien on fait une CNC amateur robuste et casi inusable pour pas un rond...
donc le micro pas ok mais quand c'est vraiment utile sinon du pas complet suffit amplement
sur certain proto j'ai pris des moteurs pas à pas d'imprimante en pas complet et non en fraction de pas pour une précision de 0.01mm et franchement j'en suis très content pour le travail demandé.
pendant que j'y pense, le micro pas est aussi un effet de mode et un argument de vente, il est montré comme le top du top mais en faite c'est du pipo, le micro pas est bien que dans certaine condition sinon on y perd en vitesse et même parfois en précision.
le soucis vient du fait que le passage d'un pas à un autre est gradué en micro pas mais si l'un saute et bien tu as un décalage dans le temps qui sera effacer une fois le pas accompli mais entre temps si tu mesure les dimensions de ta pièce et bien dans les parties courbe tu auras bien le décalage du micro pas qui n'est pas bien passé, certe ça sera casi impossible à mesurer vu qu'on descend au micron (enfin suivant le rapport de réduction évidemment) sur une distance d'un micron mais bon si le problême persiste il va y avoir répétition et c'est la qu'on va commencer à le voir.
il vaut mieux un moteur qui fait des pas franc et sans erreur qu'un qui fait des fractions de pas douteuse et non vérifiable.
un autre soucis c'est que le micro pas est le passage "graduel" d'un pas vers un autre hors les composants chauffent et donc leur réaction varie alors qu'en pas complet on a que du ON/OFF et non de transition graduelle.
Lil sera plus amène de donner son avis sur ce phénomène électronique dû à la chaleur que moi
je précise que ça dépasse très largement le cadre amateur, vu qu'on va entrer dans les courbes de vitesse, puissance, etc... donc ça frole le délir mais bon c'est juste pour comprendre
petit rajout pendant que j'y pense
ce qui m'agasse en CNC amateur c'est de voir que ça prend le même chemin que dans l'automobile c'est à dire qu'on met du fric dans le matériel électronique et le décor mais que finalement ça marche moins bien et c'est moins accessible que les anciennes voitures sans électronique, dans les CNC amateur c'est pareil, on voit un tas de machine avec guide à billes, super moteurs et carte électronique de pointe mais des chassis merdique en alu qui de ce fait donne des machines de faibles performances alors qu'avec un chassis tout acier moins cher et du matos bien choisi et bien on fait une CNC amateur robuste et casi inusable pour pas un rond...
donc le micro pas ok mais quand c'est vraiment utile sinon du pas complet suffit amplement
Invité- Invité
Re: quelle est l'utilité des micro pas ?
chris74 Dim 03 Juin 2012, 16:53
Pour ce qui est de la précision, j'aimerais quand même mieux que le 1/10  mais avec un moteur en 1/2 pas je suis avec une précision théorique de 1/100 ème ce qui me va très, mais alors ,plus que très bien . Pour le quart de mico mètre on verra plus tard...........
mais avec un moteur en 1/2 pas je suis avec une précision théorique de 1/100 ème ce qui me va très, mais alors ,plus que très bien . Pour le quart de mico mètre on verra plus tard...........
mais avec un moteur en 1/2 pas je suis avec une précision théorique de 1/100 ème ce qui me va très, mais alors ,plus que très bien . Pour le quart de mico mètre on verra plus tard...........
chris74- Chevronné
- Messages : 774
Date d'inscription : 16/10/2010
Re: quelle est l'utilité des micro pas ?
Invité Lun 04 Juin 2012, 08:29
une réduction adapté vaut mieux qu'une fraction de pas
Invité- Invité
Re: quelle est l'utilité des micro pas ?
Lil Lun 04 Juin 2012, 11:03
Bon Matin à Tous 
• La première est la perte à l'état ON (ou à l'état conducteur). Il s'agit de perte purement statique.
- Un transistor bipolaire ou un IGBT on une tension de déchet à l'état saturé qui est directement proportionnelle à la taille de la puce et du courant la traversant. Une chute de tension de l'ordre de 2V n'est pas rare à l'intensité maxi. du transistor et donc la perte sera le produit Tension x Courant (dans le transistor) x Rapport cyclique
Exemple un Transistor qui a un Vcesat de 2V à 10A et pour un rapport cyclique de 40% dissipera une puissance de 2V x 10A x 0,4 = 8W, ce qui peut paraître faible mais avec 4 transistors dans un pont en H fait 32W et donc non négligeable alors qu'il s'agit d'une très petite intensité.
- Un transistor MOS est affecté d'une perte qui s'appelle la RDSon ou la résistance Drain - Source à l'état ON.
Même calcul que précédemment sauf que l'on raisonne en RI2 :
Exemple un Transistor MOS à une RDSon de 80mΩ et donc à 10A il dissipera une puissance de 10A x 10A x 0,080mΩ = 8W
• La deuxième source des pertes est celle de la commutation. Il s'agit de pertes dynamiques et fonction de la fréquence de fonctionnement du commutateur.
Lorsqu'on rend conducteur un Transistor Bipolaire (par injection de courant dans la base) ou un Transistor IGBT ou MOS (Charge de la capacité d'entrée du MOS) "en tension", le courant Collecteur-Emetteur ou Drain-Source s'établit suivant une pente et n'est pas instantané.
De même lorsqu'on veut bloquer le courant, la décroissance n'est pas instantanée comme la montée en tension.
ce que montre la courbe jointe.
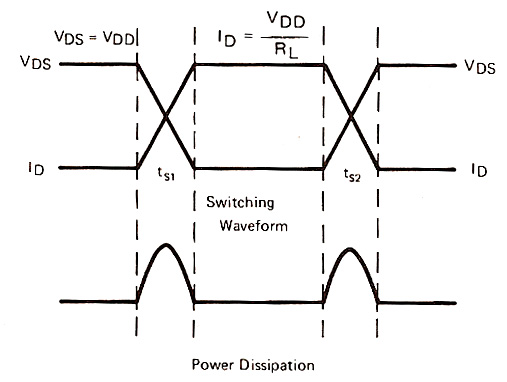
On a donc une perte à la commutation à la mise en conduction et au blocage. Cette perte est d'autant plus importante que la fréquence de fonctionnement est élevée et que les transistors sont ..."lents".
Les pertes en commutation peuvent êtres beaucoup plus élevées que les pertes en conduction.
Ce qui explique que les pertes en 1/16 de pas sont plus importantes qu'en fonctionnement en 1/2 pas car la fréquence est alors multipliée par 8.
C'est pour cela également que les étages de puissance des drivers des moteurs PAP doivent être soignés afin que les pas soient bien présents et non pas arrondis sans transition car les transistors et leurs commandes sont médiocres. Les étages de puissance sont alors de vraies chaudières.
L'idéal étant le codeur en bout d'arbre qui donne alors une boucle de retour et permet de valider le passage d'un micro-pas.
Correctement piloté un PAP peut très bien fonctionner en 1/128 pas en basse vitesse (< 250 min-1) et en 1/16 en grande vitesse (> 2 500 min-1).
Amitiés
PS : L'explication précédente est outrageusement simplifiée pour ceux qui n'ont pas l'habitude de la conversion d'énergie de puissance
Pour répondre à Ordinerf, un commutateur, Transistor bipolaire, IGBT ou MOS est affecté de deux types de pertes en régime de commutation, c'est à dire en régime non "linéaire" :Ordinerf a écrit: Lil sera plus amène de donner son avis sur ce phénomène électronique dû à la chaleur que moi
• La première est la perte à l'état ON (ou à l'état conducteur). Il s'agit de perte purement statique.
- Un transistor bipolaire ou un IGBT on une tension de déchet à l'état saturé qui est directement proportionnelle à la taille de la puce et du courant la traversant. Une chute de tension de l'ordre de 2V n'est pas rare à l'intensité maxi. du transistor et donc la perte sera le produit Tension x Courant (dans le transistor) x Rapport cyclique
Exemple un Transistor qui a un Vcesat de 2V à 10A et pour un rapport cyclique de 40% dissipera une puissance de 2V x 10A x 0,4 = 8W, ce qui peut paraître faible mais avec 4 transistors dans un pont en H fait 32W et donc non négligeable alors qu'il s'agit d'une très petite intensité.
- Un transistor MOS est affecté d'une perte qui s'appelle la RDSon ou la résistance Drain - Source à l'état ON.
Même calcul que précédemment sauf que l'on raisonne en RI2 :
Exemple un Transistor MOS à une RDSon de 80mΩ et donc à 10A il dissipera une puissance de 10A x 10A x 0,080mΩ = 8W
• La deuxième source des pertes est celle de la commutation. Il s'agit de pertes dynamiques et fonction de la fréquence de fonctionnement du commutateur.
Lorsqu'on rend conducteur un Transistor Bipolaire (par injection de courant dans la base) ou un Transistor IGBT ou MOS (Charge de la capacité d'entrée du MOS) "en tension", le courant Collecteur-Emetteur ou Drain-Source s'établit suivant une pente et n'est pas instantané.
De même lorsqu'on veut bloquer le courant, la décroissance n'est pas instantanée comme la montée en tension.
ce que montre la courbe jointe.
On a donc une perte à la commutation à la mise en conduction et au blocage. Cette perte est d'autant plus importante que la fréquence de fonctionnement est élevée et que les transistors sont ..."lents".
Les pertes en commutation peuvent êtres beaucoup plus élevées que les pertes en conduction.
Ce qui explique que les pertes en 1/16 de pas sont plus importantes qu'en fonctionnement en 1/2 pas car la fréquence est alors multipliée par 8.
C'est pour cela également que les étages de puissance des drivers des moteurs PAP doivent être soignés afin que les pas soient bien présents et non pas arrondis sans transition car les transistors et leurs commandes sont médiocres. Les étages de puissance sont alors de vraies chaudières.
L'idéal étant le codeur en bout d'arbre qui donne alors une boucle de retour et permet de valider le passage d'un micro-pas.
Correctement piloté un PAP peut très bien fonctionner en 1/128 pas en basse vitesse (< 250 min-1) et en 1/16 en grande vitesse (> 2 500 min-1).
Je ne suis pas sûre Fred, car un réducteur sans jeu n'existe pas et est très cher avec un jeu réduit alors qu'il est plus simple (industriellement) de concevoir un driver performant.Ordinerf a écrit: une réduction adapté vaut mieux qu'une fraction de pas
Amitiés
PS : L'explication précédente est outrageusement simplifiée pour ceux qui n'ont pas l'habitude de la conversion d'énergie de puissance
_________________

Lil- Modératrice

- Messages : 3059
Date d'inscription : 12/07/2010
Re: quelle est l'utilité des micro pas ?
Invité Mar 05 Juin 2012, 12:24
c'est même certain mais au niveau amateur avec des courroies tu y gagnes plus qu'avec les risques de pertes de micro pas voir même de pas lors des inversions de sens de rotation.Lil a écrit:Je ne suis pas sûre Fred, car un réducteur sans jeu n'existe pas et est très cher avec un jeu réduit alors qu'il est plus simple (industriellement) de concevoir un driver performant.
de plus il y a des engrenages plastique à denture oblique qu'on peut récupérer sur des appareils ou acheter pour un prix convenable.
de toute façon il ne faut pas se voiler la face, à un moment tu attend les limites de l'amateurisme et si tu veux les dépasser c'est le budget qui en prend un coup...
Invité- Invité
Re: quelle est l'utilité des micro pas ?
soulearth Jeu 03 Sep 2020, 08:28
Bonjour.
Je déterre un peu ce post mais j'ai une question concernant le sujet. Pour un projet de table équatoriale je recherche a piloter un moteur nema 17 avec un microcontrôleur Arduino et un driver a4988. Le but étant d'avoir un rotation après réduction de 15" / s.
Je vois que vous comparez les effets du micropas a de la réduction mécanique.
Du coup j'aimerai savoir si, a fréquence égale du microcontrôleur, si je passe du mode micropas 1/2 a micropas 1/4 je réduis la vitesse par deux ou si la vitesse est maintenu ( intervention du driver sur la fréquence ).
J'en profite aussi, si vous pouviez me dire si il y a une fréquence minimale conseillée et idem pour le maximum.
Merci d'avance
Soulearth
Je déterre un peu ce post mais j'ai une question concernant le sujet. Pour un projet de table équatoriale je recherche a piloter un moteur nema 17 avec un microcontrôleur Arduino et un driver a4988. Le but étant d'avoir un rotation après réduction de 15" / s.
Je vois que vous comparez les effets du micropas a de la réduction mécanique.
Du coup j'aimerai savoir si, a fréquence égale du microcontrôleur, si je passe du mode micropas 1/2 a micropas 1/4 je réduis la vitesse par deux ou si la vitesse est maintenu ( intervention du driver sur la fréquence ).
J'en profite aussi, si vous pouviez me dire si il y a une fréquence minimale conseillée et idem pour le maximum.
Merci d'avance
Soulearth
soulearth- Nouveau

- Messages : 1
Date d'inscription : 03/09/2020
Page 2 sur 2 • 1, 2
» choisir quelle fraise pour quelle travail et pour quelle matiere ?
» Réalisation d'une microlubrification
» bonjour je me présente - SUJET- MICRO VERIN
» Sieg X0 micro drill
» Technicien Electrodomestique: four micro ondes
» Réalisation d'une microlubrification
» bonjour je me présente - SUJET- MICRO VERIN
» Sieg X0 micro drill
» Technicien Electrodomestique: four micro ondes
Page 2 sur 2
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum|
|
|